Information about Robotic Arm.
Robotic Arm Frame Assignment
AL5B Robotic Arm

The AL5B is a 5 DOF Robotic Arm. This is a typical robot that is essentially a mechanical arm operating under computer control. Such devices, though far from the robots of science fiction, are nevertheless extremely complex electro-mechanical systems whose analytical description requires advanced methods, presenting many challenging and interesting
research problems.
DH parameters

The Denavit-Hartenberg analysis is one of the most used, in this method the direct kinematics is determined from some parameters that have to be defined, depending on each mechanism. However, it was chosen to use the homogeneous
transformation matrix. In this, analysis, once it is easily defined one coordinate transformation between two frames, where the position and orientation are fixed one with respect to the other it is possible to work with elementary homogeneous transformation operations.
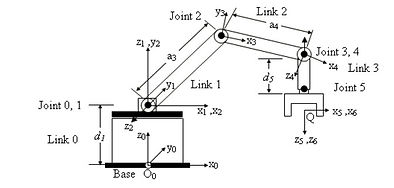
AL5B has five rotational joints and a moving grip as shown in Figure. Joint 1 represents the shoulder and its axis of motion is z1. This joint provides a rotational theta1 angular motion around z1 axis in x1y1 plane. Joint 2 is identified as the Upper Arm and its axis is perpendicular to Joint 1 axis. It provides a rotational theta2 angular motion around z2 axis in x2y2 plane. z3 axes of Joint 3 (Forearm) and Joint 4 (Wrist) are parallel to Joint 2 z-axis; they provide theta3 and theta4 angular motions in x3y3 and x4y4 planes respectively. Joint five are identified as the grip rotation. Its z5 axis is vertical to z4 axis and it provides theta5 angular motions in x5y5 plane
AL5B Robot Arm Dimensions

The AL5B Arm service represents the physical robotic arm as a list of joints, implementing the contract defined in Articulated Arm State. The five joints of the arm are defined in a serial order from the base to the wrist rotate. Each joint has only one degree of “twist” angular freedom and a range from -90 degrees to 90 degrees about the joint axis. The joint axis and joint normal are designated using coordinate system.